
Meccanismi locali di collasso
Gli eventi sismici recenti hanno posto in primo piano il problema della vulnerabilità degli edifici esistenti in muratura. L’importanza che il problema riveste è associata principalmente alla salvaguardia della vita delle persone a cui è destinato l’utilizzo della struttura.
La mancanza o la carenza di connessioni tra gli elementi strutturali in muratura provocano il verificarsi di meccanismi di collasso di tipo locale.
Quindi la valutazione della sicurezza degli edifici in muratura portante va eseguita oltre che in riferimento al comportamento globale, anche considerando i possibili meccanismi di collasso locale.
Il quadro fessurativo può fornirci un’indicazione di quali meccanismi si possano attivare sulla struttura.
Individuati tali meccanismi, occorre poi definire uno o più modelli di analisi per valutare l’entità dell’azione sismica che ne determina l’attivazione provocando il collasso della costruzione.
L’analisi è rivolta alla determinazione del coefficiente sismico moltiplicatore dei carichi orizzontali agenti sugli elementi strutturali, che attiva il cinematismo in questione.
A tal fine è possibile considerare le strutture murarie, come costituite da corpi rigidi, ed i macroelementi coinvolti nei cinematismi. La valutazione delle condizioni di equilibrio limite, sotto l’azione del sisma, è condotta trascurando la resistenza a trazione della muratura. I valori dei moltiplicatori di collasso, ottenuti per i diversi meccanismi compatibili con le caratteristiche costruttive dell’edificio analizzato, consentono di individuare quello che determina la crisi della struttura, corrispondente al moltiplicatore minore, e l’entità dell’azione sismica che lo attiva. Inoltre, consentono di segnalare altre potenziali situazioni di pericolo dovute a possibili meccanismi associati ai più bassi valori del moltiplicatore λ.
I meccanismi locali principali sono riconducibili principalmente a due categorie:
- cinematismi di collasso connessi al comportamento della muratura fuori dal piano, meccanismi di ribaltamento (meccanismi di 1° modo);
- cinematismi di collasso associati alla risposta della parete nel piano, meccanismi di scorrimento (meccanismi di 2° modo).
1. Analisi cinematica lineare
Le analisi dei meccanismi locali di collasso fuori dal piano vengono qui sviluppate tramite l’analisi limite dell’equilibrio secondo l’approccio cinematico che si basa sulla scelta del meccanismo di collasso e la valutazione dell’azione orizzontale che attiva tale cinematismo. Per ogni possibile meccanismo locale ritenuto significativo per l’edificio, il metodo impiegato prevede la trasformazione di una parte della costruzione in un sistema labile attraverso l’individuazione di corpi rigidi definiti individuando possibili piani di frattura.
Come già detto, si considera nulla la resistenza a trazione della muratura; in genere si considera infinita la resistenza a compressione della stessa. I corpi sono in grado di ruotare o scorrere tra loro e per ogni meccanismo viene valutato il moltiplicatore orizzontale dei carichi λ, che comporta la sua attivazione. Per ottenere il moltiplicatore orizzontale dei carichi, al quale fare riferimento in fase di verifica, è necessario applicare ai blocchi rigidi, che compongono la catena cinematica, tutte le azioni che si esercitano sul sistema e che sono costituite da:
- i pesi propri dei blocchi, applicati nei rispettivi baricentri;
- i carichi verticali portati dagli stessi, quali: pesi propri e sovraccarichi dei solai, delle volte e della copertura e di altri elementi murari non considerati nel modello strutturale;
- un sistema di forze orizzontali proporzionali ai carichi verticali portati, se queste non sono efficacemente trasmesse ad altre parti dell’edificio;
- eventuali ulteriori forze esterne, ad esempio quelle trasmesse da catene metalliche.
Il moltiplicatore λ si ottiene applicando il Principio dei Lavori Virtuali, in termini di spostamenti, uguagliando il lavoro totale eseguito dalle forze esterne, applicate al sistema in corrispondenza di un atto di moto virtuale, al lavoro di eventuali forze interne dove:

- n: è il numero di tutte le forze peso applicate ai diversi blocchi della catena cinematica;
- m: è il numero di forze peso non direttamente gravanti sui blocchi le cui masse, per effetto dell’azione sismica, generano forze orizzontali sugli elementi della catena cinematica, in quanto non efficacemente trasmesse ad altre parti dell’edificio;
- o: è il numero di forze esterne, non associate a masse, applicate ai diversi blocchi;
- Pi: è la generica forza peso applicata al blocco;
- Pj: è la generica forza peso, non direttamente applicata ai blocchi, la cui massa, per effetto dell’azione sismica, genera una forza orizzontale sugli elementi della catena cinematica, in quanto non efficacemente trasmesse ad altre parti dell’edificio;
- δix: è lo spostamento virtuale orizzontale del punto di applicazione dell’i-esimo peso Pi, assumendo come verso positivo quello associato alla direzione secondo cui agisce l’azione sismica che attiva il meccanismo;
- δjx: è lo spostamento virtuale orizzontale del punto di applicazione dell’j-esimo peso Pj, assumendo come verso positivo quello associato alla direzione secondo cui agisce l’azione sismica che attiva il meccanismo;
- δiy: è lo spostamento virtuale verticale del punto di applicazione dell’i-esimo peso Pi, positivo se verso l’alto;
- Fh: è il valore assoluto della generica forza esterna applicata ad un blocco;
- δh: è lo spostamento virtuale del punto di applicazione dell’h-esima forza esterna, nella direzione della stessa e di segno positivo se di verso discorde;
- Lfi: è il lavoro di eventuali forze interne.
Gli spostamenti dei punti di applicazione delle forze sono calcolati tenendo conto della geometria della struttura, assegnando una rotazione virtuale al generico blocco.
2. Verifica di sicurezza SLV
La verifica di attivazione del meccanismo avviene confrontando l’accelerazione di attivazione del meccanismo con l’accelerazione sismica.
La verifica è soddisfatta se l’accelerazione di attivazione del meccanismo è maggiore di quella
sismica, le due accelerazioni sono definite con le seguenti formule: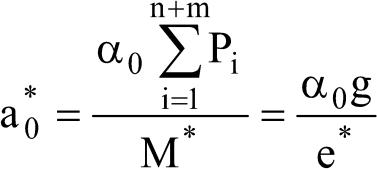
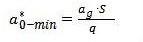
se la porzione di struttura interessata dal meccanismo di collasso è vincolata a terra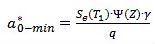
se la porzione di struttura interessata dal meccanismo di collasso è posizionata ad una quota superiore.
Dove:
- a*0: l’accelerazione sismica spettrale di attivazione del meccanismo;
- ag: funzione della probabilità di superamento dello stato limite scelto e della vita di riferimento;
- S: prodotto del coefficiente di amplificazione topografica e del coefficiente di amplificazione stratigrafica;
- q: fattore di struttura, assunto uguale a 2;
- Se(T1): spettro elastico, funzione della probabilità di superamento dello stato limite scelto e del periodo di riferimento VR, calcolato per il periodo T1;
- ψ(Z): primo modo di vibrazione nella direzione considerata, normalizzato ad uno in sommità all’edificio; in assenza di valutazioni più accurate può essere assunto ψ (Z)=Z/H, dove H è l’altezza della struttura rispetto alla fondazione;
- γ: coefficiente di partecipazione modale (in assenza di valutazioni più accurate può essere assunto γ=3N/(2N+1), con N numero di piani dell’edificio).
3. Meccanismi più frequenti
Vediamo ora quali sono i meccanismi di collasso più frequenti e quali sono le cause che possono provocare tali meccanismi. I meccanismi più frequenti sono:
- Ribaltamento semplice
- Ribaltamento composto
- Ribaltamento del cantonale
- Flessione verticale
3.1 Ribaltamento semplice
Il meccanismo si manifesta attraverso la rotazione rigida di intere facciate o di porzioni di pareti rispetto ad assi orizzontali alla base di esse sollecitate da azioni fuori dal piano.
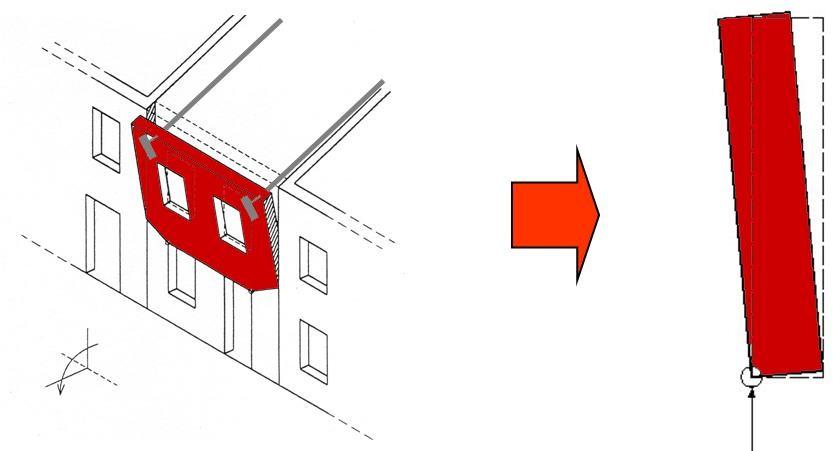
Figura 1- Ribaltamento di parete semplice
Questo meccanismo è provocato dall’assenza di vincoli in sommità e dall’assenza di vincolo con le pareti ortogonali.
3.2 Ribaltamento composto
Anche questo meccanismo si manifesta attraverso la rotazione rigida di una parete che trascina però una porzione della parete ortogonale ad essa
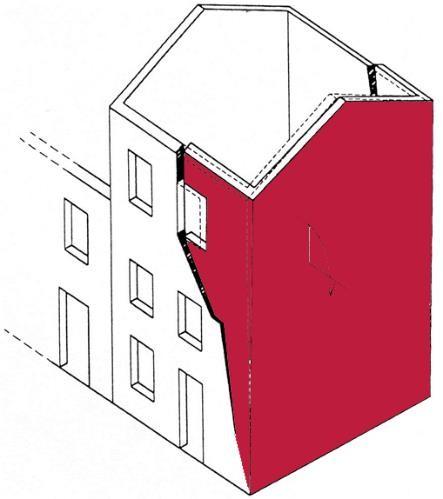
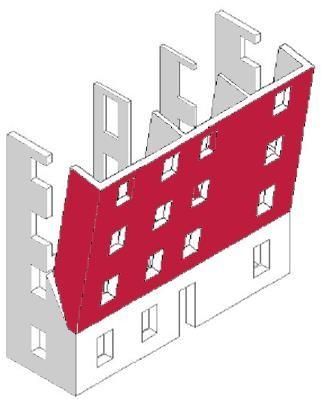
Figura 2- Ribaltamento di parete composto
In questo caso si ha sempre una mancanza di connessione tra la parete e l’orientamento, ma la connessione tra le pareti è efficace e inoltre la parete ortogonale a quella interessata dal meccanismo ha una scarsa tessitura.
3.3 Ribaltamento del cantonale
Il meccanismo si manifesta attraverso la rotazione rigida di un cuneo di distacco, delimitato da superfici di frattura ad andamento diagonale in pareti ortogonali tra esse.
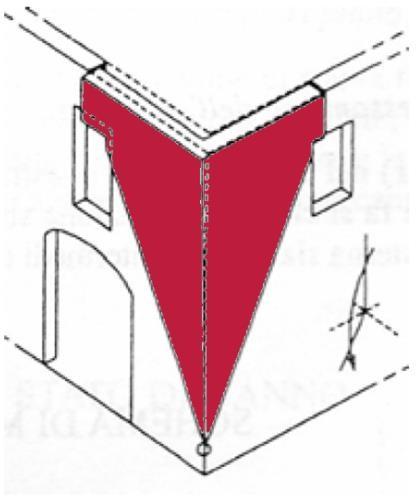
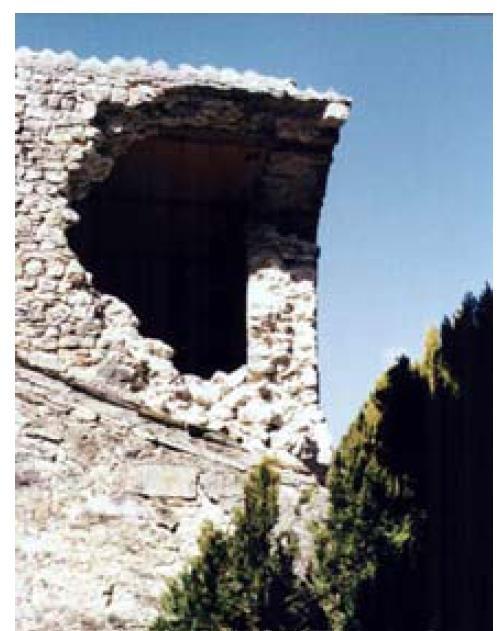
Figura 3- Ribaltamento del cantonale
Questo tipo di meccanismo si manifesta in edifici che presentano spinte concentrate in testa ai cantonali dovute soprattutto ai carichi trasmessi dai puntoni dei tetti a padiglione.
3.4 Flessione Verticale
Quando si attiva questo meccanismo si forma una cerniera cilindrica orizzontale che divide la parete in due blocchi che ruotano reciprocamente intorno a questo asse.
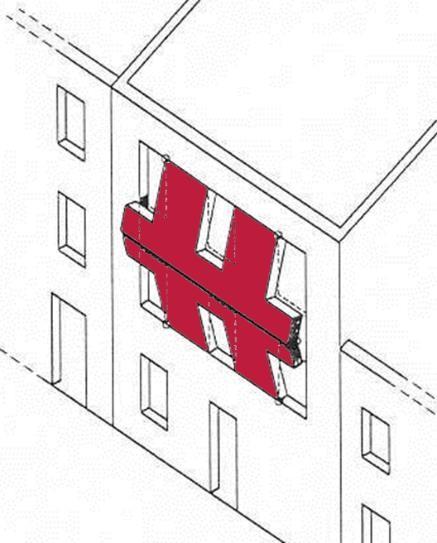

Figura 4- Flessione orizzontale
Si può manifestare quando i due blocchi della parete che si vengono a creare sono ben ammorsati rispettivamente all’orizzontamento inferiore e a quello superiore, ma non sono ammorsati al solaio intermedio che crea un effetto di martellamento.
4. Applicazioni Pratiche
In questo paragrafo vedremo quando devono essere verificati questi meccanismi e come vengono calcolati con il software 3Muri. La verifica dei meccanismi locali va eseguita per garantire che la struttura abbia un comportamento scatolare, questo tipo di comportamento è una prerogativa per poter effettuare una analisi globale di tipo pushover. La normativa non indica un numero minimo di meccanismi da verificare, né quali meccanismi devono essere verificati. Il progettista deve scegliere i meccanismi da verificare in base alla configurazione della sua struttura e al quadro fessurativo della stessa.
4.1 Ribaltamento semplice della parete
Se nella struttura non sono presenti cordoli di collegamento, l’ammorsamento tra le pareti è di scarsa qualità, ed esistono delle spinte orizzontali non contrastate è probabile che questo meccanismo si attivi e quindi deve essere verificato.
In 3Muri per modellare il ribaltamento semplice della parete si deve definire un blocco cinematico, inserire una cerniera orizzontale ai piedi del bocco e si può calcolare il meccanismo.
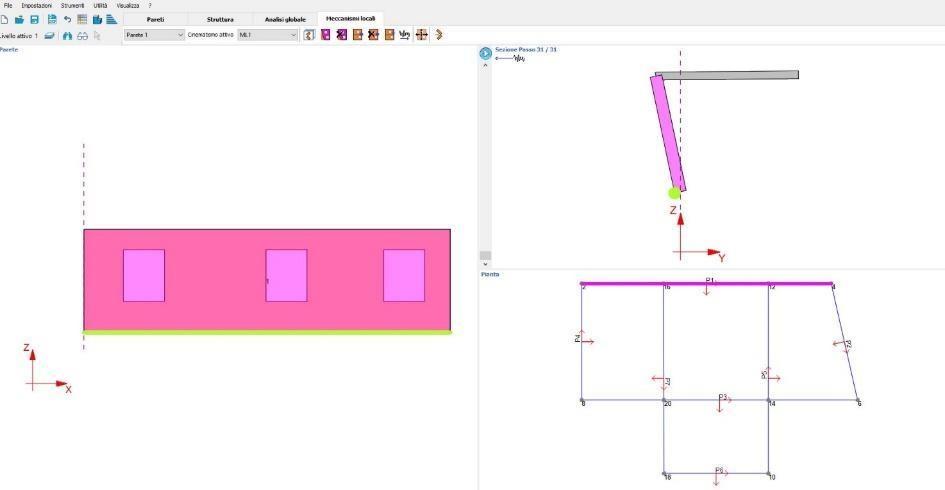
Figura 5-ribaltamento parete 3Muri
Se l’accelerazione di attivazione del meccanismo è minore dell’accelerazione sismica la verifica non è soddisfatta perché il meccanismo si attiverebbe con una accelerazione inferiore a quella attesa per quel dato stato limite (fig.6)
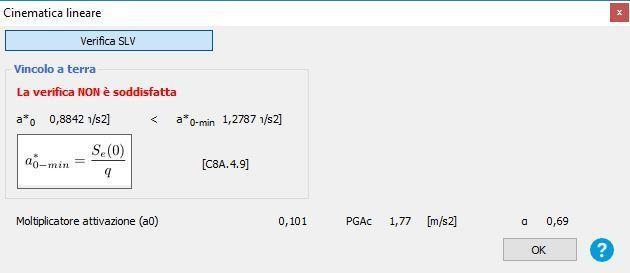
Figura 6-verifica meccanismo locale
L’indice di vulnerabilità della struttura è fornito come il rapporto tra le accelerazioni: limite di innesco del meccanismo e richiesta dalla normativa.
Per migliorare il comportamento della struttura nei confronti del meccanismo, e raggiungere la verifica, è possibile modellare in 3Muri vari tipi rinforzi.
Una prima modellazione dei rinforzi può esser effettuata inserendo delle forze, concentrate in un punto o distribuite, che simulano l’effetto del rinforzo sul blocco cinematico.
Ad esempio, se noi inserissimo dei cordoli sulla nostra struttura potremmo applicare una forza stabilizzante orizzontale che simula l’azione delle armature del cordolo. Per successive iterazioni si ricerca la forza minima che verifica il meccanismo. Infine, sarà sufficiente verificare che la forza trovata non sia superiore a quella di snervamento delle armature.
L’intervento più comune per migliorare il comportamento della struttura ed evitare che si attivi un meccanismo locale è l’inserimento di catene, in corrispondenza dei solai, fornendo così un effetto stabilizzante alla struttura.
Per inserire una catena in 3Muri, si apre la finestra di definizione dei carichi, poi si seleziona l’opzione collegamento catena. Per definire l’elemento catena è necessario selezionare un nodo di riferimento, definire lo spostamento relativo rispetto al nodo, il tiro della catena e l’angolazione orizzontale e verticale della forza.
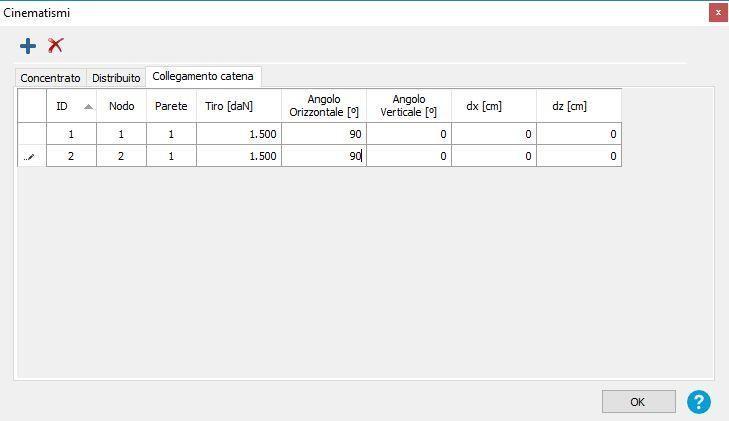
Figura 7- Inserimento catena
Dopo aver inserito la catena si procede nuovamente alla verifica del meccanismo locale (fig. 8).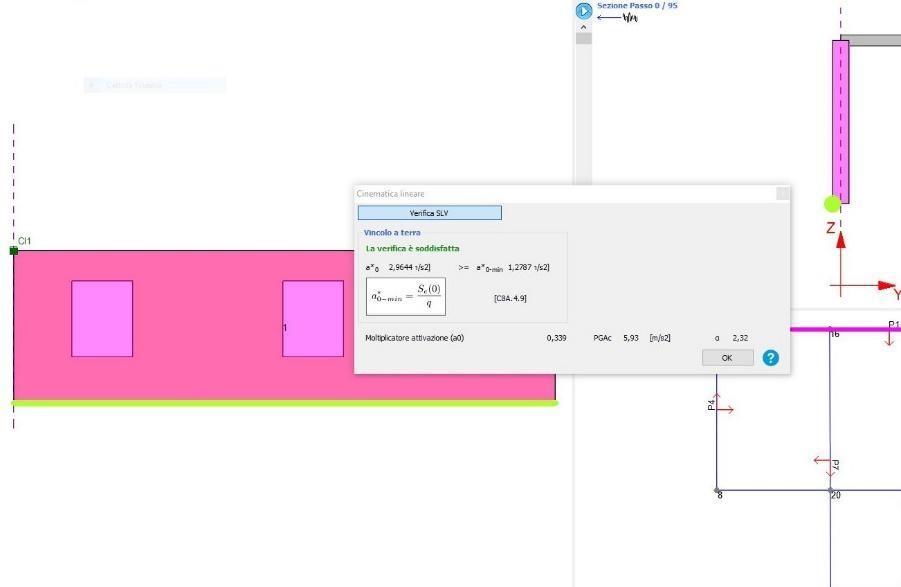
Figura 8- verifica meccanismo con catena
Dopo aver applicato il carico della catena stabilizzante la verifica risulta essere soddisfatta, perché l’accelerazione di attivazione è pari 2,32 volte quella richiesta (affinché la verifica risulti soddisfatta il rapporto deve essere maggiore di 1).
Dopo aver appurato che la verifica del meccanismo è soddisfatta si possono dimensionare le catene e le piastre di ancoraggio, eseguendo contestualmente le verifiche di punzonamento, penetrazione e snervamento (fig.9).
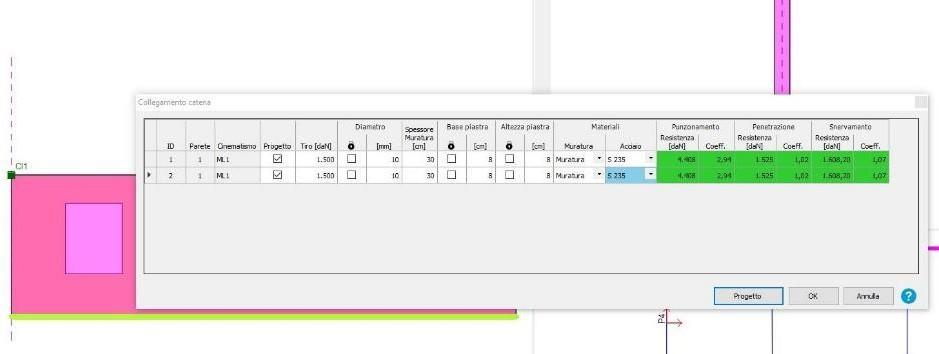
Figura 9 – Dimensionamento catena
4.2 Ribaltamento semplice del timpano
Nel caso di una copertura con solai che hanno una rigidezza molto bassa si può definire il tetto come “non strutturale”. In quel caso gli elementi che costituiscono il tetto (ad esempio il timpano), non sono inseriti nella verifica globale. In questo caso si può rendere necessaria anche la verifica a ribaltamento del timpano come vediamo in fig. 6. Le procedure di inserimento del blocco cinematico e di verifica sono del tutto analoghe a quelle viste per la parete semplice. Si noti che il blocco cinematico può assumere qualsiasi forma poligonale chiusa con base orizzontale, per seguire il perimetro della struttura del tetto o comunque riprodurne il quadro fessurativo.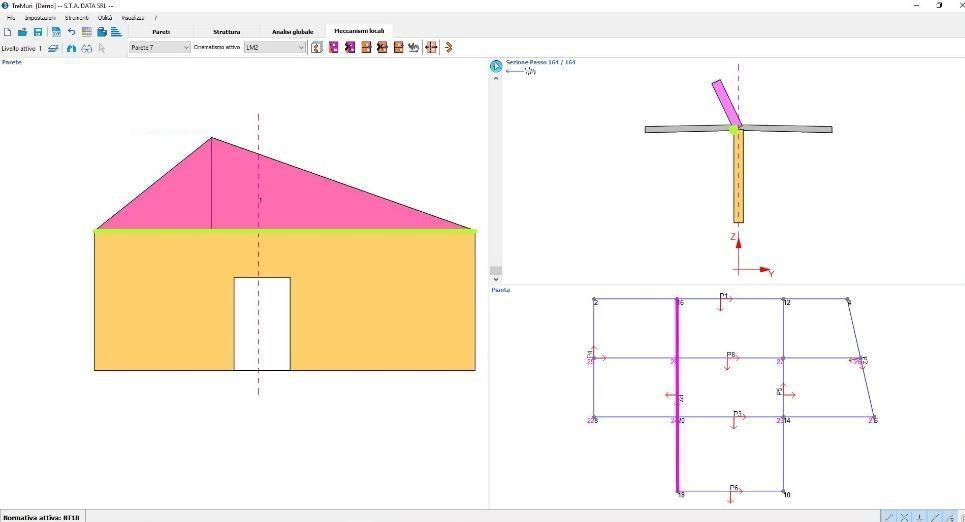
Figura 6-ribaltamento parete 3Muri
4.3 Ribaltamento composto
Se invece la parete non è connessa con l’orizzontamento, ma è ben ammorsata alle pareti ortogonali è opportuno verificare il meccanismo di ribaltamento composto.
In 3Muri vengono definiti 3 blocchi, quello della parete oggetto di esame e due blocchi diagonali sulle pareti ortogonali ad esso, in modo tale da simulare l’ammorsamento tra la parete oggetto del ribaltamento e le due pareti ortogonali. Infine, si inserisce una cerniera orizzontale al piede del blocco principale.
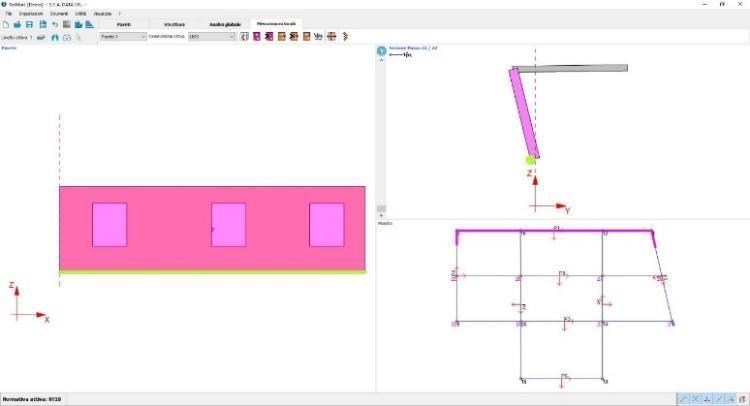
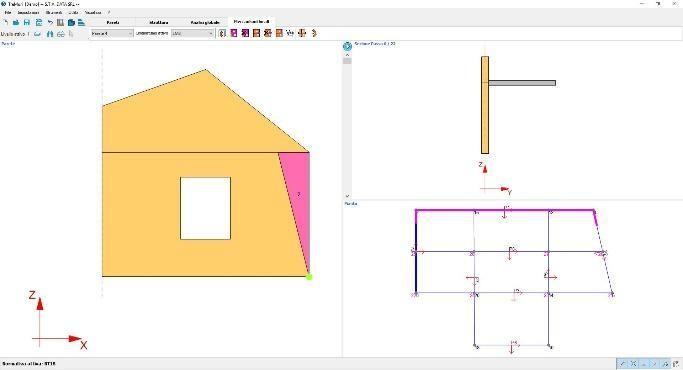
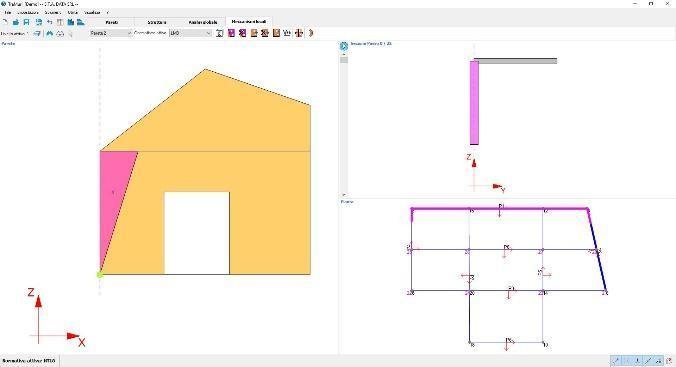
Figura 7-ribaltamento composto parete 3Muri
4.4 Ribaltamento del cantonale
Il meccanismo di ribaltamento del cantonale va verificato quando nella struttura è presente un tetto a padiglione, perché i puntoni del tetto hanno un effetto spingente sulle pareti.
In 3Muri si definiscono due blocchi diagonali e poi si posiziona una cerniera a 45°, cioè ortogonale alla direzione di spinta del cantonale.
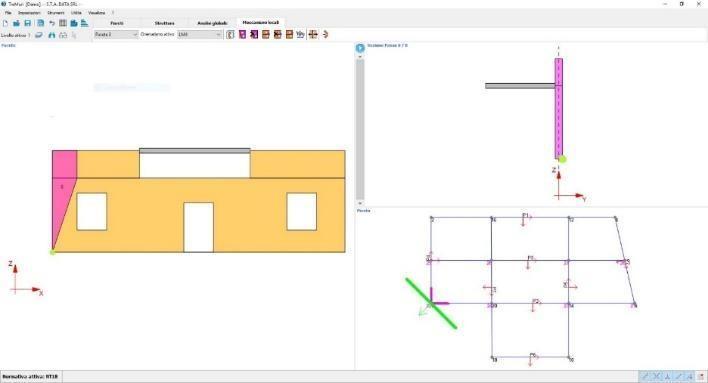
Figura 8-ribaltamento cantonale 3Muri
4.5 Flessione verticale
In una struttura a più piani può capitare che gli ammorsamenti delle pareti agli orizzontamenti dei vari piani non sia sempre lo stesso, perché magari la struttura è stata costruita in epoche diverse, magari con tipologie costruttive differenti.
Il differente ammorsamento della parete ai vari livelli può provocare il meccanismo di flessione verticale.
Ipotizziamo di avere una struttura a due piani, la parete è ancorata in fondazione, mentre al piano in sommità è presente un cordolo di collegamento, mentre al piano intermedio il solaio non è ben ammorsato alla parete.
In questo caso sarebbe opportuno verificare anche il meccanismo di flessione verticale, perché il solaio intermedio potrebbe avere un effetto martellamento sulla parete e creare lo spanciamento della stessa.
In 3Muri per simulare questo meccanismo si definiscono due blocchi cinematici, si posizionano 2 cerniere, una interna e una esterna alla parete, ed infine un appoggio esterno in sommità al blocco superiore.

Figura 9-Flessione verticale
Naturalmente in una struttura in muratura si possono creare meccanismi con geometrie anche molto differenti; nel presente capitolo sono stati riportati gli schemi più frequenti ai quali è possibile riportare la maggior parte delle geometrie fessurative degli edifici oggetto di verifica.








